
Baubericht MB Racetruck
 |  |
Ich entschied mich für einen 6x12mm (10 ohm) Motor, der über eine Schnecke direkt ein 35Z POM Zahnrad auf der Hinterachse antreibt, als Motorregler kommt der preiswerte ER500 von Mikroantriebe zum Einsatz. Die Lenkung übernimmt ein Graupner XC-50 Servo in Verbindung mit einer Faller Vorderachse. Als Empfänger arbeitet der bekannte GWS-R4P. Die Wiking Hartplastikbereifung wurde gegen Räder von Faller ausgetauscht.
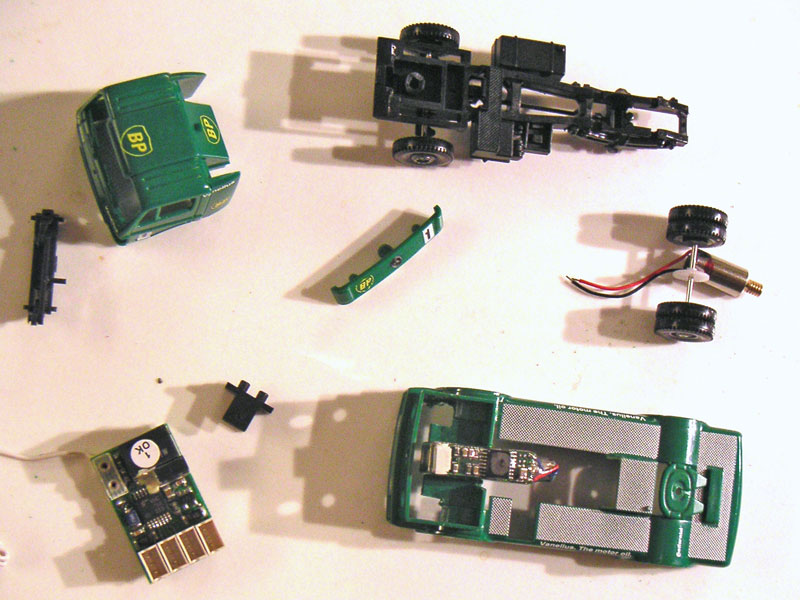 |  |
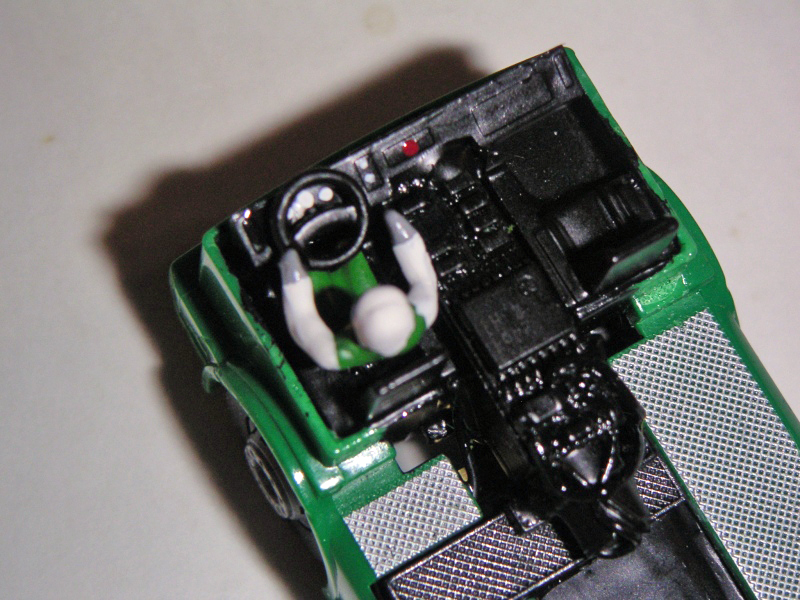
Nach dem Zerlegen des Modells wurde zunächst die Einbaulage der Fernsteuerkomponenten bestimmt. Das Graupner XC50 Servo wurde in Längsrichtung im Fahrerhaus untergebracht. An dem Lenkservo wurde die Anschlußbuchse entfernt und die Kabel direkt angelötet. ACHTUNG: +/- sind bei dem XC50 im Vergleich mit anderen Servos vertauscht.
 | 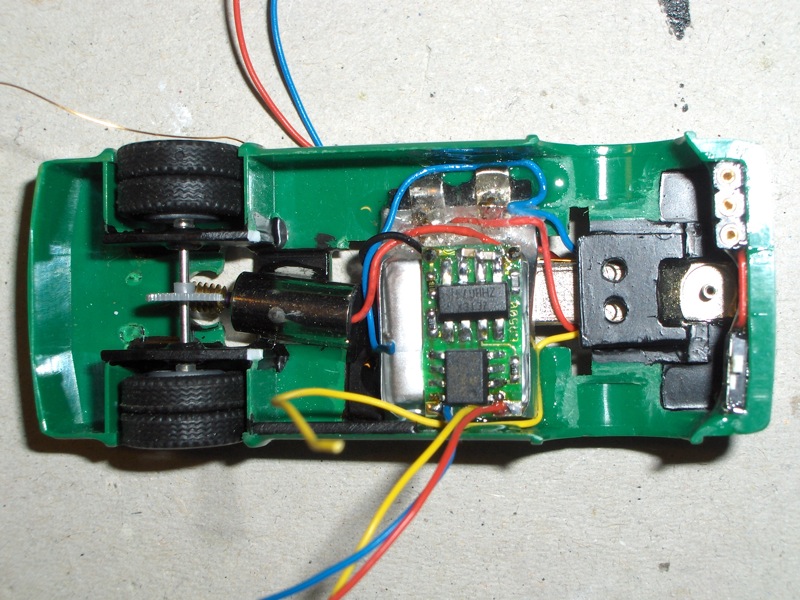 |
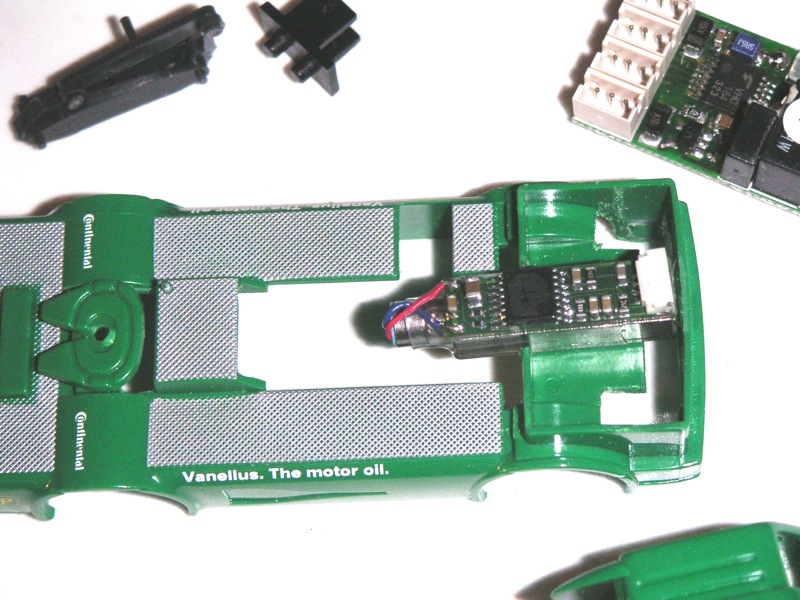
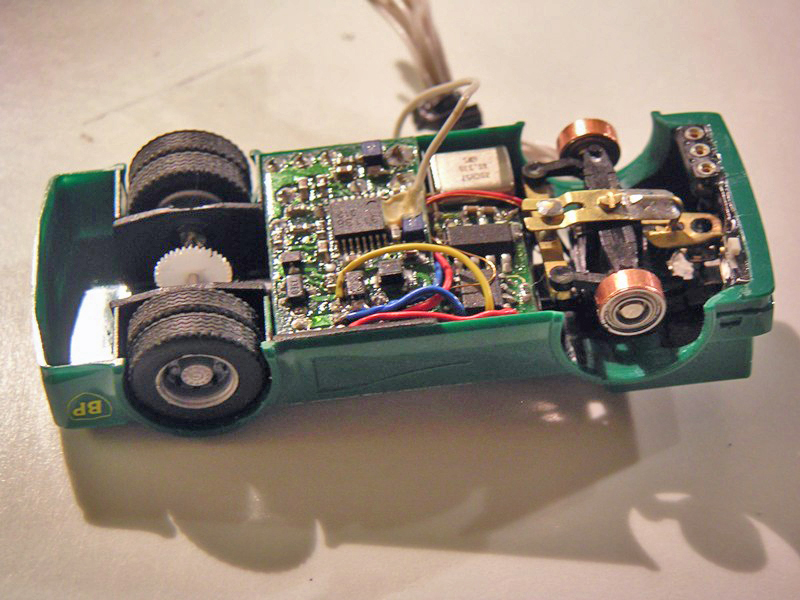
Das originale Wiking Fahrgestell ist überflüssig geworden. Als Hinterachslagerung wurden zwei Kunststoffplatten mit Messingbuchsen in die Chassiswanne eingeklebt und im vorderen Bereich eine Aufnahme für die Faller Lenkachse geschaffen. Der Antriebsmotor ist in Fahrtrichtung etwas schräg eingebaut, damit die Antriebsschnecke gerade in die Verzahnung des Antriebszahnrades eingreift. Auf dem Foto rechts oben erkennt man die 90er LiPo-Zelle und den darauf angebrachten Fahrtregler recht gut.
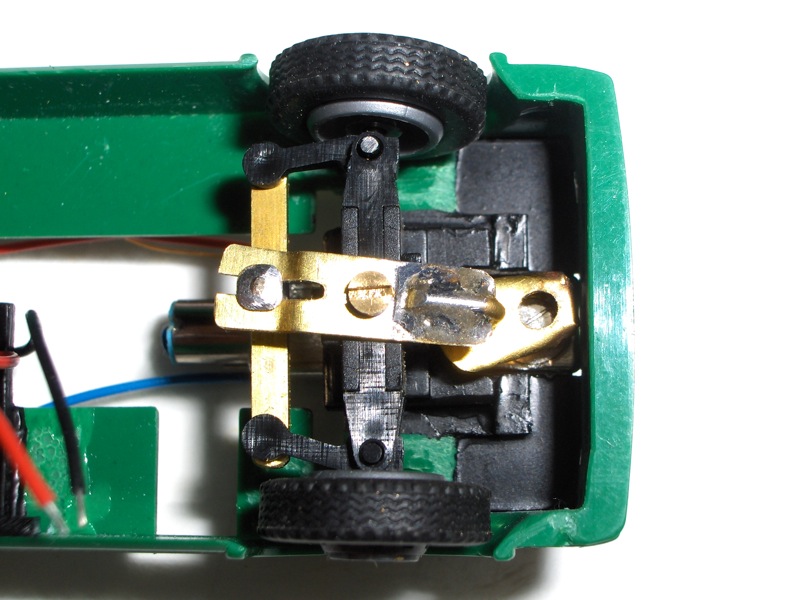 |  |
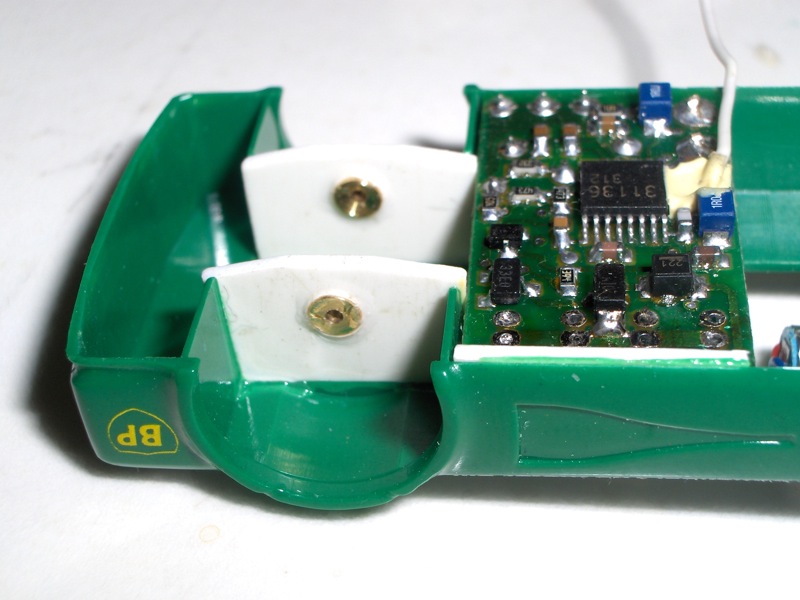
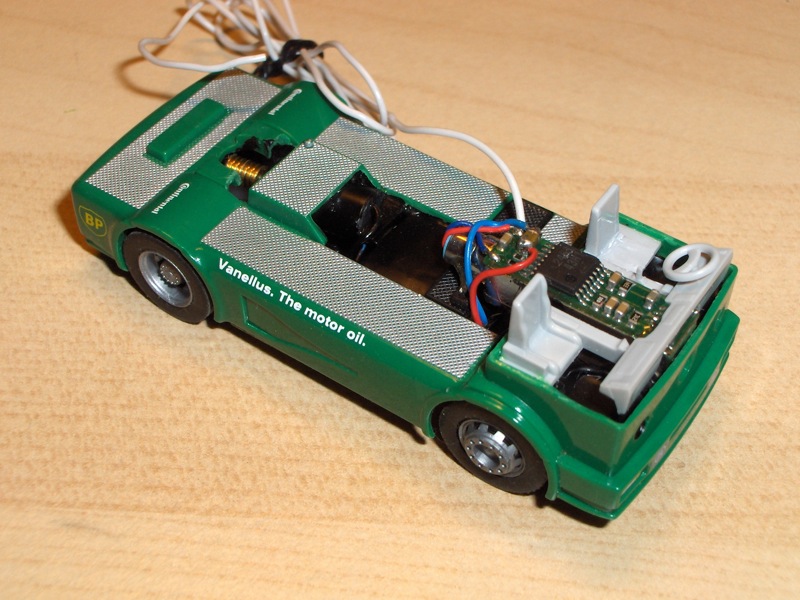
Auf dem ersten Foto kann man die Lenkmechanik mit Zwischenhebel gut erkennen. Diese relativ aufwendige Mechanik wurde notwendig, um die Spurstange in Fahrtrichtung gesehen hinter die Vorderachse zu bekommen. Dieses ist wichtig, da das kurveninnere Rad dann einen stärkeren Lenkeinschlag macht als das Kurvenäußere. Der Empfänger wurde aus Platzgründen seiner Anschlußbuchsen beraubt, alle Kabel wurden direkt angelötet. Auf dem zweiten Bild sieht man den fast fertigen Renntruck. Gut zu erkennen sind die Kugellager der Vorderräder, sowie Ein/Aus-Schalter und Ladebuchse hinter der vorderen Stoßstange.
 |  |
![]()